-
1 гораздо
-
2 гораздо
Гораздо -- much; farРусско-английский научно-технический словарь переводчика > гораздо
-
3 гораздо
гораздо πολύ πιο \гораздо боль ший πολύ πιο μεγάλος \гораздо больше πολύ περισσότερα \гораздо лучше πολύ (πιο) καλύτερα \гораздо меньше πολύ (πιο) λιγότε ρα \гораздо хуже πολύ (πιο) χει ρότερα* * *гора́здо бо́льший — πολύ πιο μεγάλος
гора́здо бо́льше — πολύ περισσότερα
гора́здо лу́чше — πολύ (πιο) καλύτερα
гора́здо ме́ньше — πολύ (πιο) λιγότερα
гора́здо ху́же — πολύ (πιο) χειρότερα
-
4 больше
•This was 0.1% above the true value.
•Saturated hydrocarbons absorb only very high energy radiation, usually beyond 160 nm.
•Over (or In excess of, or More than) 50 kilos...
* * *Больше -- greater, higher, more; better Больше на (15 -- 25%)-- The measured torque of all the arched bearing was 15 to 25 percent higher in every case than that of the conventional bearing.—вынуждает больше полагаться наРусско-английский научно-технический словарь переводчика > больше
-
5 меньше
•The life expectancy in this case is under (or less than) a year.
•This coefficient is some 40% below unity.
•They have energies under (or less than, or below) 1,000,000 eV.
•The actual diameter of the shanks of commercial reamers may be from 0.002 to 0.005 in. under the reamer size.
* * *Меньше -- smaller, lesser (ср. степень от "малый"); less (ср. степень от "мало")Русско-английский научно-технический словарь переводчика > меньше
-
6 меньше
1. συγκρ. β. του επ. милый κ. маленький μικρότερος•меньше всех μικρότερος όλων.
2. συγκρ. β. του επίρ. мало λιγότερο•гораздо меньше πολύ λιγότερο•
меньше всего το λιγότερο•
ни больше ни меньше ούτε πολύ ούτε λίγο, ούτε παραπάνω ούτε παρακάτω•
как можно меньше όσο το δυνατό λιγότερο.
-
7 меньше
сравнит. ст.он меньше меня ростом ар сэщ нахьи нахь цIыкIу2. от нареч. мало нахь макIкак можно меньше сыд фэдизкIи нахь макIэгораздо меньше, чем... бэкIэ нахь макI...не больше и не меньше нахь мыбэу ыкIи нахь мымакIэу, мынахьыбэу ыкIи мынахьмакIэу -
8 многоканальная многоточечная распределительная система
многоканальная многоточечная распределительная система
Система наземного телевещания, аналог кабельного телевидения, но без кабеля, некоторым образом сходная со спутниковой телевещательной системой – только спутник-ретранслятор в этом случае как бы находится на земле.
Во многих случаях этот способ распространения теле- и радиопрограмм имеет неоспоримые преимущества перед давно известными и широко используемыми – по кабельным сетям и посредством спутников – ретрансляторов. Так, в частности, приёмные антенны могут быть значительно меньше спутниковых, ведь мощность MMDS- сигнала гораздо больше, чем сигнал от спутника.
[ http://www.morepc.ru/dict/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > многоканальная многоточечная распределительная система
-
9 менее
Меньше, нрч.1) менше, менш, ум. меншенько, меншечко. [Літом продається їх (мітел) менше, то менше й роблю (Франко)]. -нее (-ньше) кого чего - менш(е) від кого, від чого, за кого, за що, ніж (як) хто, що. -нее ста рублей - менш(е) як сто (від ста) карбованців. Нас было не -нее ста человек - нас було не менш(е) як сто чоловік(а). Ни гроша -нее (- ньше) - ні шага (ні шеляга) менше. И того -нее (-ньше) - і менш від того, і від того менше. Как можно -нее (-ньше) - як-найменш(е), як-мога менше. Тем -нее (-ньше) - тим менше. Тем не -нее - проте, а проте, а втім, але, але-ж, однак, одначе, з усім тим. [Низка селянських постатів, часто безименних, проте добре схарактеризованих (Єфр.)]. Более или -нее, более -нее - більш-менш, більше-менше, більше чи менше. [Справу більш-менш з'ясовано (Київ)]. Больше ли, или -ньше - чи більше, чи менше. [Чи більш йому даси, чи менше, все одно ще попросить (Брацлавщ.)]. Ни более, ни -нее как - не більш(е), не менш(е) як; не більше й не менше як. -нее как, -нее чем - менш(е) ніж, менш як. Я окончил эту работу -нее чем в неделю - я скінчив цю працю менш як за тиждень. Это интересует меня гораздо -нее (-ньше), нежели вас - це цікавить мене багато (далеко) менше, ніж вас. Я заплатил за это двумя рублями -нее чем вы - я заплатив за це на два карбованці менш(е), ніж ви (менше від вас, за вас). -нее (-ньше) чем кто- (что-, где-, куда-, когда-) либо - менш ніж хто (будь- хто), ніж що (будь-що), ніж де (будь-де), ніж куди (будь-куди), ніж коли (будь-коли). Чем -нее (-ньше) - тем -нее (-ньше) - що менше - то менше. Чем -нее (-ньше) - тем более (больше); чем более (больше) - тем -нее (-ньше) - що менш(е) - то більш(е), що більш(е) - то менш(е). [Що більше робітник продає мускулів, то менше їх у нього зостається (Ніков.)]. Всё -нее (-ньше) и -нее (-ньше) - (все) менш(е) та (і) менш(е), (с каждым разом) що-раз(у) (чим-раз, де-далі) менше. -нее (-ньше) всего или всего -нее (-ньше) - найменш(е), як- найменш(е), що-найменш(е), (най)менш за все, (най)менш від усього. Я -нее всего думаю об этом - про це я думаю найменше (менш за все). Меньше становится чего-л. - меншає (неопр. меншати) чого. [Землі у мужиків меншає (Крим.)];2) -нее (в формах отрицательн. ср. ст. от прлг. и нрч.) - менш, менше, (не столь) (при прлг.) не такий (-ка, ке; мн. -кі), (при нрч.) не так. -нее удачный, удачно - менш удалий, менш удало, (не столь) не такий удалий, не так удало. Не -нее - не менш(е). Он не -нее умён, чем она - він не менш - розумний, ніж вона; він не дурніший за (від) неї;3) -ньше, прлг. - см. отдельно (Меньше 1).* * *1) сравн. ст. прил. менший2) сравн. ст. нареч. ме́нше, менш3) (для образования сравн. ст. прил., нареч.) менш, ме́нше -
10 аварийный сигнал (в автоматизированных системах)
аварийный сигнал
аварийная сигнализация
Оповещение оператора о наступлении определенного события, связанного с нарушением или угрозой нарушения регламентного течения технологического процесса.
[ http://kazanets.narod.ru/AlarmsArchive.htm]Аварийные сигналы настраиваются путем задания предельных значений (границ, thresholds) индивидуально для каждой процессной переменной. Система автоматически отслеживает изменение процессной переменной и сопоставляет ее значение с заранее настроенными границами. В случае выхода переменной за нормальные границы система генерирует оповещение и фиксирует его в журнале аварийных сигналов. Рассмотрим наиболее часто используемые аварийные сигналы для аналоговых величин:
Lo – нижняя предупредительная граница. В случае если процессная переменная становится меньше Lo, генерируется предупредительное оповещение.
LoLo – нижняя аварийная граница. В случае если процессная переменная становится меньше LoLo, генерируется аварийный сигнал.
Hi - верхняя предупредительная граница. В случае если процессная переменная становится больше Hi, генерируется предупредительное оповещение.
HiHi – верхняя аварийная граница. В случае если процессная переменная становится больше HiHi, генерируется аварийный сигнал.
DEV_HI (DEVIATION_HI) – верхняя граница отклонения (рассогласования). Если разность (абсолютное значение) между двумя переменными становится больше DEV_HI, то генерируется аварийный сигнал. Например, такой сигнал можно настроить у блока PID; в этом случае система будет сигнализировать об отклонении регулируемой величины от уставки, превышающей границу DEV_HI. По аналогии можно настроить сигнал DEV_LO.
ROC_HI (RATE_OF_CHANGE_HI) – верхняя граница скорости изменения. Система отслеживает скорость изменения процессной переменной (первую производную). Если скорость возрастания переменной выше границы ROC_HI, то генерируется аварийный сигнал.
Для дискретных переменных сигналов гораздо меньше. По сути их всего две – аварийное состояние, соответствующее значению 1, или авария в случае значения 0.
На рис. 4 показана схема появления аварийных сигналов на примере быстро изменяющейся процессной переменной. Стоит отменить, что на рисунке изображены отнюдь не все генерируемые оповещения. Например, при возврате переменной обратно в нормальный диапазон значений, кроме изображенных на рисунке, генерируется оповещение RETURN_TO_NORMAL
Рис. 4. Пример генерации аварийных сигналов и оповещений.Важность (или критичность) аварийного сигнала определяется приоритетом (целое число). Как правило, чем выше приоритет у аварийного сигнала, тем критичнее она для производства, и тем быстрее на нее надо обратить внимание.
При появлении аварийного сигнала у оператора есть два варианта действий:
1. Игнорировать его. Не всегда хорошее решение, мягко говоря. При этом если процессная переменная вернется обратно в нормальные границы, то появиться новое оповещение UNACK_RETURN_TO_NORMAL, говорящее о том, что оператор проспал аварийное событие, но, к счастью, все нормализовалось.
2. Подтвердить, что сигнал замечен оператором ( acknowledge). Дело в том, что сразу после появления аварийного сигнала ему автоматически присваивается статус UNACK (не подтвержден). Как только сигнал подтверждают (иногда говорят “квитируют”), его статус становится ACK (подтвержден). В этом случае возврат переменной в нормальные границы ведет к появлению оповещения ACK_RETURN_TO_NORMAL, свидетельствующее о том, что оператор “держит ухо востро”.
Аварийные сигналы можно произвольно группировать. На практике группировка проводится путем распределения процессных переменных, а следовательно, и соответствующих им аварийных сигналов по различным технологическим участкам ( plant areas) и установкам ( plant units).
[ http://kazanets.narod.ru/AlarmsArchive.htm]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > аварийный сигнал (в автоматизированных системах)
-
11 довольно
нареч.Русскому наречию степени довольно в значении достаточно, порядочно, очень — соответствует группа английских наречий степени. Само понятие степени может быть представлено в виде некоторой шкалы, на которой каждое наречие занимает свое место, т. е. английские эквивалениы соотносятся между собой по степени интенсивности качества.1. pretty — довольно, почти, довольно-таки, вполне, весьма (в отличие от quite, fairly и rather, которые передают лишь семантику степени, pretty несет в себе еще и оценочный элемент значения, а также смягчает резкость и категоричность утверждения): It's a pretty mess! — Хорошенькая история!/Ничего себе беспорядочек! It's a pretty state of affairs! — Вот так история! How are you doing? — Pretty well, thanks. — Kaк поживаете? — Спасибо, вполне прилично. I'm pretty tired. — Я довольно устал. Не did pretty well in his exams. — Он прилично сдал экзамены. That's pretty much the same thing. — Это почти одно и то же. I'm pretty certain she enjoys it. — Я почти уверен, что ей это нравится. I thought it was really pretty good for the first attempt. — Я подумал, это совсем неплохо для первой пробы./Я думал, это совсем неплохо для первой попытки. If you don't mind my saying so, that's pretty strange. — С вашего позволения, это весьма странно. Не had a pretty fair idea of it. — У него были довольно четкие представления по этому поводу. I told him pretty much the same what you have just told me. — Я сказал ему почти то же, что вы сейчас мне говорите.2. fairly —довольно, сносно, прилично, буквально (больше чем несколько, но гораздо меньше чем very — очень; употребляется только с прилагательным в положительной степени, с глаголом имеет значение быстро или много): The house has a fairly large garden. — При доме был довольно большой участок./При доме был довольно приличный сад. She speaks English fairly well. — Она вполне сносно говорит по-английски./Она вполне прилично говорит по-английски. Не fairly raced past us on his motorcycle. — Он стремительно промчался мимо нас на мотоцикле. We went to the theatre fairly often. — Мы довольно часто ходили в театр. Не enjoys fairly good health. — Он вполне здоров./У него вполне приличное здоровье./У него неплохое здоровье. His statement explains the situation fairly well. — Его заявление достаточно проясняет ситуацию. She fairly screamed at me. — Она почти орала на меня./Она почти визжала на меня.3. very — довольно, очень, весьма, отнюдь нет, значительно, гораздо: a very trying time — очень тяжелое время; very much — очень; not very good — неважный; not very'well — неважно; not very rich — небогатый; not so very small — не такой уж маленький/довольно большой Did you like the play? — Very much. — Вам понравилась пьеса? — Очень, I was very pleased. — Я был очень рад. I feel very much better. — Мне значительно лучше. It is very much warmer. — Стало гораздо теплее./Сильно потеплело. I am not so very sure. — Я в этом отнюдь не уверен. You are not very polite. — Вы не очень-то вежливы. That's not a very nice thing to say, — Это не очень-то любезно./Это довольно грубо. I am not very fond of music. — Я не очень люблю музыку.4. rather —довольно, порядочно, весьма, скорее, очень ( rather единственное наречие из данной группы, которое может употребляться с прилагательным в сравнительной степени; относясь к существительным, оно может стоять как перед артиклем, так и после него; rather выражает наивысшую степень качества; с существительными и в обороте or rather является формой уточнения): rather older — много старше; a rather good idea/rather a good idea — довольно хорошая идея lt is rather hotter this summer in Italy than usual. — Это лето в Италии гораздо жарче, чем прошлое. That's rather the impression I wanted to give. — Это как раз/именно то впечатление, которое я и хотел произнести. I rather think so. — Я почти уверен, что это так. It is rather difficult. — Это труднее ( чем я ожидал). Не rang me up at night, or rather early in the morning. — Он позвонил мне ночью, или скорее рано утром. -
12 импульсное перенапряжение
- surge voltage
- surge overvoltage
- surge
- spike
- pulse surge
- power surge
- peak overvoltage
- high-voltage surge
- electrical surge
- damaging transient
- damaging surge
импульсное перенапряжение
В настоящее время в различных литературных источниках для описания процесса резкого повышения напряжения используются следующие термины:- перенапряжение,
- временное перенапряжение,
- импульс напряжения,
- импульсная электромагнитная помеха,
- микросекундная импульсная помеха.
Мы в своей работе будем использовать термин « импульсное перенапряжение», понимая под ним резкое изменение напряжения с последующим восстановлением
амплитуды напряжения до первоначального или близкого к нему уровня за промежуток времени до нескольких миллисекунд вызываемое коммутационными процессами в электрической сети или молниевыми разрядами.
В соответствии с классификацией электромагнитных помех [ ГОСТ Р 51317.2.5-2000] указанные помехи относятся к кондуктивным высокочастотным переходным электромагнитным апериодическим помехам.
[Техническая коллекция Schneider Electric. Выпуск № 24. Рекомендации по защите низковольтного электрооборудования от импульсных перенапряжений]EN
surge
spike
Sharp high voltage increase (lasting up to 1mSec).
[ http://www.upsonnet.com/UPS-Glossary/]Параллельные тексты EN-RU
The Line-R not only adjusts voltages to safe levels, but also provides surge protection against electrical surges and spikes - even lightning.
[APC]Автоматический регулятор напряжения Line-R поддерживает напряжение в заданных пределах и защищает цепь от импульсных перенапряжений, в том числе вызванных грозовыми разрядами.
[Перевод Интент]
Surges are caused by nearby lightning activity and motor load switching
created by air conditioners, elevators, refrigerators, and so on.
[APC]
ВОПРОС: ЧТО ЯВЛЯЕТСЯ ИСТОЧНИКОМ ИМПУЛЬСНЫХ ПЕРЕНАПРЯЖЕНИЙ И ПОМЕХ?
Основных источников импульсов перенапряжений - всего два.
1. Переходные процессы в электрической цепи, возникающие вследствии коммутации электроустановок и мощных нагрузок.
2. Атмосферный явления - разряды молнии во время грозыВОПРОС: КАК ОПАСНОЕ ИМПУЛЬСНОЕ ПЕРЕНАПРЯЖЕНИЕ МОЖЕТ ПОПАСТЬ В МОЮ СЕТЬ И НАРУШИТЬ РАБОТУ ОБОРУДОВАНИЯ?
Импульс перенапряжения может пройти непосредственно по электрическим проводам или шине заземления - это кондуктивный путь проникновения.
Электромагнитное поле, возникающее в результате импульса тока, индуцирует наведенное напряжение на всех металлических конструкциях, включая электрические линии - это индуктивный путь попадания опасных импульсов перенапряжения на защищаемый объект.ВОПРОС: ПОЧЕМУ ПРОБЛЕМА ЗАЩИТЫ ОТ ИМПУЛЬСНЫХ ПЕРЕНАПРЯЖЕНИЙ ОСТРО ВСТАЛА ИМЕННО В ПОСЛЕДНЕЕ ВРЕМЯ?
Эта проблема приобрела актуальность в связи с интенсивным внедрением чувствительной электроники во все сферы жизни. Учитывая возросшее количество информационных линий (связь, телевидение, интернет, ЛВС и т.д.) как в промышленности, так и в быту, становится понятно, почему защита от импульсных перенапряжений и приобрела сейчас такую актуальность.[ http://www.artterm-m.ru/index.php/zashitaseteji1/faquzip]
Защита от импульсного перенапряжения. Ограничитель перенапряжения - его виды и возможности
Перенапряжением называется любое превышение напряжения относительно максимально допустимого для данной сети. К этому виду сетевых помех относятся как перенапряжения связанные с перекосом фаз достаточно большой длительности, так и перенапряжения вызванные грозовыми разрядами с длительностью от десятков до сотен микросекунд. Методы и средства борьбы зависят от длительности и амплитуды перенапряжений. В этом отношении импульсные перенапряжения можно выделить в отдельную группу.
Под импульсным перенапряжением понимается кратковременное, чрезвычайно высокое напряжение между фазами или фазой и землей с длительностью, как правило, до 1 мс.
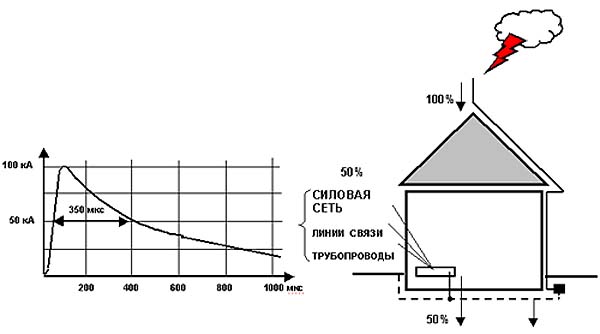
Грозовые разряды - мощные импульсные перенапряжения возникающие в результате прямого попадания молнии в сеть электропитания, громоотвод или импульс от разряда молнии на расстоянии до 1,5 км приводящий к выходу из строя электрооборудования или сбою в работе аппаратуры. Прямое попадание характеризуется мгновенными импульсными токами до 100 кА с длительностью разряда до 1 мС.
При наличии системы громоотвода импульс разряда распределяется между громоотводом, сетью питания, линиями связи и бытовыми коммуникациями. Характер распределения во многом зависит от конструкции здания, прокладки линий и коммуникаций.
Переключения в энергосети вызывают серию импульсных перенапряжений различной мощности, сопровождающуюся радиочастотными помехами широкого спектра. Природа возникновения помех приведена на примере ниже.
Например при отключении разделительного трансформатора мощностью 1кВА 220\220 В от сети вся запасенная трансформатором энергия "выбрасывается" в нагрузку в виде высоковольтного импульса напряжением до 2 кВ.
Мощности трансформаторов в энергосети значительно больше, мощнее и выбросы. Кроме того переключения сопровождаются возникновением дуги, являющейся источником радиочастотных помех.
Электростатический заряд, накапливающийся при работе технологического оборудования интересен тем, что хоть и имеет небольшую энергию, но разряжается в непредсказуемом месте.
Форма и амплитуда импульсного перенапряжения зависят не только от источника помехи, но и от параметров самой сети. Не существует два одинаковых случая импульсного перенапряжения, но для производства и испытания устройств защиты введена стандартизация ряда характеристик тока, напряжения и формы перенапряжения для различных случаев применения.
Так для имитации тока разряда молнии применяется импульс тока 10/350 мкс, а для имитации косвенного воздействия молнии и различных коммутационных перенапряжений импульс тока с временными характеристиками 8/20 мкс.
Таким образом, если сравнить два устройства с максимальным импульсным током разряда 20 кА при 10/ 350 мкс и 20 кА при импульсе 8/20 мкс у второго, то реальная "мощность" первого примерно в 20 раз больше.
Существует четыре основных типа устройств защиты от импульсного перенапряжения:
1. Разрядник
Представляет собой ограничитель перенапряжения из двух токопроводящих пластин с калиброванным зазором. При существенном повышении напряжения между пластинами возникает дуговой разряд, обеспечивающий сброс высоковольтного импульса на землю. По исполнению разрядники делятся на воздушные, воздушные многоэлектродные и газовые. В газовом разряднике дуговая камера заполнена инертным газом низкого давления. Благодаря этому их параметры мало зависят от внешних условий (влажность, температура, запыленность и т.д.) кроме этого газовые разрядники имеют экстремально высокое сопротивление (около 10 ГОм), что позволяет их применять для защиты от перенапряжения высокочастотных устройств до нескольких ГГц.При установке воздушных разрядников следует учитывать выброс горячего ионизированного газа из дуговой камеры, что особенно важно при установке в пластиковые щитовые конструкции. В общем эти правила сводятся к схеме установки представленной ниже.
Типовое напряжение срабатывания в для разрядников составляет 1,5 - 4 кВ (для сети 220/380 В 50 Гц). Время срабатывания порядка 100 нс. Максимальный ток при разряде для различных исполнений от 45 до 60 кА при длительности импульса 10/350 мкс. Устройства выполняются как в виде отдельных элементов для установки в щиты, так и в виде модуля для установки на DIN - рейку. Отдельную группу составляют разрядники в виде элементов для установки на платы с токами разряда от 1 до 20 кА (8/20 мкс).
2. Варистор
Керамический элемент, у которого резко падает сопротивление при превышении определенного напряжения. Напряжение срабатывания 470 - 560 В (для сети 220/380 В 50 Гц).Время срабатывания менее 25 нс. Максимальный импульсный ток от 2 до 40 кА при длительности импульса 8/20 мкс.
Устройства выполняются как в виде отдельных элементов для установки в радиоаппаратуру, так и в виде DIN - модуля для установки в силовые щиты.
3. Разделительный трансформатор
Эффективный ограничитель перенапряжения - силовой 50 герцовый трансформатор с раздельными обмотками и равными входным и выходным напряжениями. Трансформатор просто не способен передать столь короткий высоковольтный импульс во вторичную обмотку и благодаря этому свойству является в некоторой степени идеальной защитой от импульсного перенапряжения.Однако при прямом попадании молнии в электросеть может нарушиться целостность изоляции первичной обмотки и трансформатор выходит из строя.
4. Защитный диод
Защита от перенапряжения для аппаратуры связи. Обладает высокой скоростью срабатывания (менее 1 нс) и разрядным током 1 кА при токовом импульсе 8/20 мкс.Все четыре выше описанные ограничителя перенапряжения имеют свои достоинства и недостатки. Если сравнить разрядник и варистор с одинаковым максимальным импульсным током и обратить внимание на длительность тестового импульса, то становится ясно, что разрядник способен поглотить энергию на два порядка больше, чем варистор. Зато варистор срабатывает быстрее, напряжение срабатывания существенно ниже и гораздо меньше помех при работе.
Разделительный трансформатор, при определенных условиях, имеет безграничный ресурс по защите нагрузки от импульсного перенапряжения (у варисторов и разрядников при срабатывании происходит постепенное разрушение материала элемента), но для сети 100 кВА требуется трансформатор 100кВА (тяжелый, габаритный и довольно дорогой).
Следует помнить, что при отключении первичной сети трансформатор сам по себе генерирует высоковольтный выброс, что требует установки варисторов на выходе трансформатора.
Одной из серьезных проблем в процессе организации защиты оборудования от грозового и коммутационного перенапряжения является то, что нормативная база в этой области до настоящего времени разработана недостаточно. Существующие нормативные документы либо содержат в себе устаревшие, не соответствующие современным условиям требования, либо рассматривают их частично, в то время как решение данного вопроса требует комплексного подхода. Некоторые документы в данный момент находятся в стадии разработки и есть надежда, что они вскоре выйдут в свет. В их основу положены основные стандарты и рекомендации Международной Электротехнической Комиссии (МЭК).
[ http://www.higercom.ru/products/support/upimpuls.htm]
Чем опасно импульсное перенапряжение для бытовых электроприборов?
Изоляция любого электроприбора рассчитана на определенный уровень напряжения. Как правило электроприборы напряжением 220 – 380 В рассчитаны на импульс перенапряжения около 1000 В. А если в сети возникают перенапряжения с импульсом 3000 В? В этом случае происходит пробои изоляции. Возникает искра – ионизированный промежуток воздуха, по которому протекает электрический ток. В следствии этого – электрическая дуга, короткое замыкание и пожар.
Заметьте, что прибой изоляции может возникнуть, даже если у вас все приборы отключены от розеток. Под напряжением в доме все равно останутся электропроводка, распределительные коробки, те же розетки. Эти элементы сети также не защищены от импульсного перенапряжения.
Причины возникновения импульсного перенапряжения.
Одна из причин возникновения импульсных перенапряжений это грозовые разряды (удары молнии). Коммутационные перенапряжения которые возникают в результате включения/отключения мощной нагрузки. При перекосе фаз в результате короткого замыкания в сети.
Защита дома от импульсных перенапряжений
Избавиться от импульсных перенапряжений - невозможно, но для того чтобы предотвратить пробой изоляции существуют устройства, которые снижают величину импульсного перенапряжения до безопасной величины.
Такими устройствами защиты являются УЗИП - устройство защиты от импульсных перенапряжений.
Существует частичная и полная защита устройствами УЗИП.
Частичная защита подразумевает защиту непосредственно от пробоя изоляции (возникновения пожара), в этом случае достаточно установить один прибор УЗИП на вводе электрощитка (защита грубого уровня).
При полной защите УЗИП устанавливается не только на вводе, но и возле каждого потребителя домашней электросети (телевизора, компьютера, холодильника и т.д.) Такой способ установки УЗИП дает более надежную защиту электрооборудованию.
[ Источник]
Тематики
EN
3.1.24 импульсное перенапряжение (surge): Резкий подъем напряжения, вызванный электромагнитным импульсом удара молнии и проявляющийся в виде повышения электрического напряжения или тока до значений, представляющих опасность для изоляции или потребителя.
Источник: ГОСТ Р МЭК 62305-2-2010: Менеджмент риска. Защита от молнии. Часть 2. Оценка риска оригинал документа
3.35 импульсное перенапряжение (surge): Резкий подъем напряжения, вызванный электромагнитным импульсом удара молнии и проявляющийся в виде повышения электрического напряжения или тока до значений, представляющих опасность для изоляции или потребителя.
Источник: ГОСТ Р МЭК 62305-1-2010: Менеджмент риска. Защита от молнии. Часть 1. Общие принципы оригинал документа
Русско-английский словарь нормативно-технической терминологии > импульсное перенапряжение
-
13 значительный
1. intense2. smart3. substantialсущественные, значительные издержки — substantial costs
4. useful5. wideварьирусь в значительной степени — vary widely (refl.)
варьировась в значительной степени — vary widely (refl.)
варьирующ в значительной степени — varying widely (refl.)
варьировавш в значительной степени — varying widely (refl.)
6. important7. greatlyв большой мере, в значительной степени — to a great extent
8. large9. notable10. pretty11. substantially12. well13. meaningful14. amain15. appreciably16. apreciably17. by farзначительно; несомненно — by far
18. considerably19. far20. far and awayгораздо, намного, значительно — out and away
21. materially22. muchочень, в значительной степени; почти — pretty much
23. sensible24. significantly25. sizable26. sizably27. sizeable28. tremendously29. vastly30. considerable; large; important; significant; suggestive31. goodlyмного, значительное количество — a good deal
32. significant33. tidyСинонимический ряд:важно (проч.) важно; значимо; немаловажно; судьбоносно; существенно; эпохально -
14 отравление реактора
отравление реактора
йодная яма
Поглощение нейтронов частью ядер, у которых сечения поглощения в области энергии тепловых нейтронов велики (образующихся при делении урана и плутония) концентрация которых относительно быстро достигает равновесного значения. Отравление реактора практически полностью определяется ядрами Xe-135 и Sm-149.
Рассмотрим отравление Xe-135. Вероятность поглощения тепловых нейтронов этим нуклидом очень велика. Поэтому отравление наиболее существенно в реакторах на тепловых нейтронах и практически отсутствует в реакторах на быстрых нейтронах. Можно предположить, что Xe-135 возникает лишь при делении U-235, потому что выход Xe-135 слабо меняется из-за присутствия других делящих ядер.
После пуска реактора количество Xe-135 вначале довольно резко возрастает, а затем, через некоторое время из-за ряда процессов достигает стационарного уровня (при работе реактора на стационарном уровне мощности). После остановки реактора количество ядер Xe-135 увеличивается и проходит через максимум. При уменьшении потока нейтронов до нуля прекращается убыль ядер Xe-135 вследствие поглощения нейтронов, которая является преобладающей при достаточно больших мощностях. В то же время скорость образования ядер Xe-135 уменьшается гораздо медленнее, так как время жизни I-135 достаточно велико. Таким образом, после остановки реактора происходит уменьшение реактивности (обусловленное увеличением отравления ксеноном), которое принято называть йодной ямой. Поэтому при пуске реактора после кратковременной остановки требуется запас реактивности для компенсации йодной ямы.
С помощью специальных режимов остановки реактора удается заметно уменьшить глубину йодной ямы, а значит, и запас реактивности, необходимый для пуска реактора после кратковременной остановки. Нестационарное отравление реактора происходит не только при остановке реактора, но и при любом изменении его мощности. Если мощность реактора снижается, то имеет место травление аналогичное йодной яме, но меньшем в масштабе. Увеличение мощности сопровождается обратным эффектом - количество ксенона сначала уменьшается, а спустя некоторый промежуток времени увеличивается.
Теперь рассмотрим отравление реактора Sm-149. Потеря нейтронов за счет отравления самарием значительно меньше, чем за счет отравления ксеноном. Аналогично Xe-135, после пуска реактора для Sm-149 наблюдается сначала рост концентрации самария, а потом насыщение. Время насыщения определяется мощностью реактора. При остановке реактора происходит возрастание количества ядер Sm-149 вследствие радиоактивного распада Рm-149 и наблюдается явление, аналогичное йодной яме, с тем, однако, отличием, что число ядер Sm-149 монотонно возрастает во времени (практически приближается к насыщению). Последнее связано со стабильностью Sm-149. Количество самария при насыщении тем больше, чем на большей мощности работал реактор до остановки. Уменьшение реактивности при остановке реактора, обусловленное отравлением Sm-149, значительно меньше глубины йодной ямы, зато в отличие от последней оно сохраняется во времени. Т.е. снижение реактивности вследствие поглощения нейтронов в активной зоне реактора образующимися продуктами деления (главным образом, Xe-135 и Sm-149).
[ http://pripyat.forumbb.ru/viewtopic.php?id=25]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > отравление реактора
-
15 внимание
см. большое внимание уделено; в центре внимания; занимать чьё-л. внимание; заслуживать внимания; не обращать внимания; не принимать во внимание; не учитывать; обращать внимание на; относиться с должным вниманием к; предлагать вниманию; пренебрегать; привлекать внимание; принимать во внимание; уделять внимание* * *Внимание -- attention, consideration, emphasis (обращаемое на что-либо, уделяемое чему-либо); warning, caution, danger (предупреждение об опасности)—в настоящем исследовании внимание сосредоточено на—в последнее время стали обращать внимание и на—внимание будет сосредоточено на—если обратить внимание на—заставили обратить более пристальное внимание на—не обращать внимания на—не обращая внимания на—обратите внимание на—обращать внимание на—обращать более пристальное внимание на—основное внимание обращается на—основное внимание при измерениях было сосредоточено на—особое внимание было обращено на—пользуясь случаем, я обращаю ваше внимание на—причём особое внимание обращается на—пришлось обратить серьёзное внимание на—сосредотачивать внимание на—сосредотачивают все внимание наРусско-английский научно-технический словарь переводчика > внимание
-
16 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
17 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
18 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
19 куда
куданареч1. вопр. ποῦ, γιά πού:\куда ты идешь? πού πᾶς;· \куда он уехал? γιά πού ἐφυγε;·2. относ. ὀπου, πού· 3.:\куда бы то ни было ὁπουδήποτε, ὅπου (κἰ ἄν), ὅπου καί νά εἶναι, ὅπου καί νά ήτανε· \куда (бы) ни пошел ὅπου (или ὁπουδήποτε) κι ἄν πάει·4. (зачем, для чего) разг γιατί, προς τί:\куда тебе столько книг? γιατί τόσα βιβλία;·5. (гораздо) разг:\куда лу́чше πολύ καλλίτερα· \куда больше πολύ περισσότερο· \куда меньше πολύ (ό)λιγώτε-ρο· ◊ хоть \кудаΙ разг μιά χαρά!, φίνος!· \куда ни шло! ἔστω!, ἄς εἶναι!См. также в других словарях:
больше — Более, больше. [...] форма описательной сравнительной степени с более представляет собой целостное грамматическое единство, хотя и менее тесное, чем форма превосходной степени с самый. Слово более вне связи с прилагательным постепенно выходит из… … История слов
больше — нар., употр. наиб. часто 1. Больше это одна из форм слов «большой» и «много». Мои сапоги больше, чем твои. | Они стали зарабатывать больше денег. | Меня гораздо больше интересует будущее. | Ты нравишься Андрею больше всех. 2. Вы используете слово … Толковый словарь Дмитриева
меньше — сравнительная степень, употр. очень часто 1. Если какой либо объект меньше другого объекта, значит, его размеры не такие большие, как у этого объекта. Бельгия меньше Франции. 2. Вы используете слово меньше, чтобы указать на то, что количество… … Толковый словарь Дмитриева
более / больше(,) чем — наречное выражение и слова в составе сопоставительного оборота 1. Наречное выражение (без частицы «не»). То же, что «весьма, очень, вполне». Между словами «более (больше)» и «чем» знак препинания не ставится. «Вот они какие, – думал сановник,… … Словарь-справочник по пунктуации
ГОРАЗДЫЙ — ГОРАЗДЫЙ, искусный, способный, знающий, опытный на какое либо дело, мастер, источник; смышленый, ловкий, расторопный. Это парень гораздый; он горазд на все. Наш Тарас на все гораздо и водку пить, и овин молотить. Иногда, о вещи или деле, хороший … Толковый словарь Даля
Семейство полорогие — (Bovidae)** * * Семейство полорогих, или бычьих самая обширная и разнообразная группа парнокопытных, включает 45 50 современных родов и около 130 видов. Полорогие животные составляют естественную, ясно очерченную группу. Как ни… … Жизнь животных
Семейство кошачьи — (Felidae)* * Кошачьи действительно, как пишет Брем, представляют собой самый совершенный тип хищников иными словами наиболее специализированные представители отряда. Семейство включает 36 видов, группируемых в 10 12 родов (хотя разные… … Жизнь животных
Россия. Экономический отдел: Россия в сельскохозяйственном отношении — I Вступление. Российская империя простирается от 34° до 77° с. ш. и от 35° до 203° в. д. Такая громадная территория не может не представлять чрезвычайного разнообразия. В общем можно сказать, что чем далее двигаться от западной границы, тем, при… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Семейство ястребиные — Птицы, принадлежащие к этому семейству, характеризуются совершенно оперенными плюснами, достигающими длины среднего пальца, кругловатыми или яйцевидными, почти вертикально расположенными в восковице ноздрями и хвостом, равным половине… … Жизнь животных
Семейство волчьи, или псовые — (Canidae)** * * Семейство объединяет 16 современных родов и 36 видов. Псовые широко распространены в Евразии, Африке, Северной и Южной Америке, на Новую Гвинею и в Австралию проникли с человеком. За исключением одного вида, имеют более… … Жизнь животных
Безработица — (Unemployment) Безработица – это такое социально экономическое явление, при котором часть взрослого трудоспособного населения, не имеет работы и активно ее ищет Безработица в России, Китае, Японии, США и странах Еврозоны, в том числе в кризисные… … Энциклопедия инвестора
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Адыгейский
- Английский
- Греческий
- Итальянский
- Немецкий
- Украинский
- Французский